Perazah aims to contribute to human society through robot technology. Perazah was founded in 2020 based on the technology accumulated over the past 20 years at the Human Robotics Lab of Hanyang University.
Perazah's representative technology is the surgical robot field. In 2008, we developed a spinal surgery robot for the first time in Korea, and in the 2010s, we have developed various surgical robots such as an otolaryngology surgical robot and a vascular intervention surgical robot. The first commercial item is an artificial intelligence navigation-based vascular intervention surgical robot system for embolization of liver cancer patients. The first and second prototypes have been developed through the first stage national project of (2018-2020) for the past three years, and prototypes for licensing and commercialization are expected to be developed for the next two years. In the future, we are spurring the development of a modular vascular type interventional robotic system that encompasses not only the field of embolization, but also the overall field of vascular intervention. Research and development are also underway. We are also conducting research and development on various surgical robots using continuum mechanisms that are inserted into various natural orifice of the human body and used for diagnosis and treatment purposes.
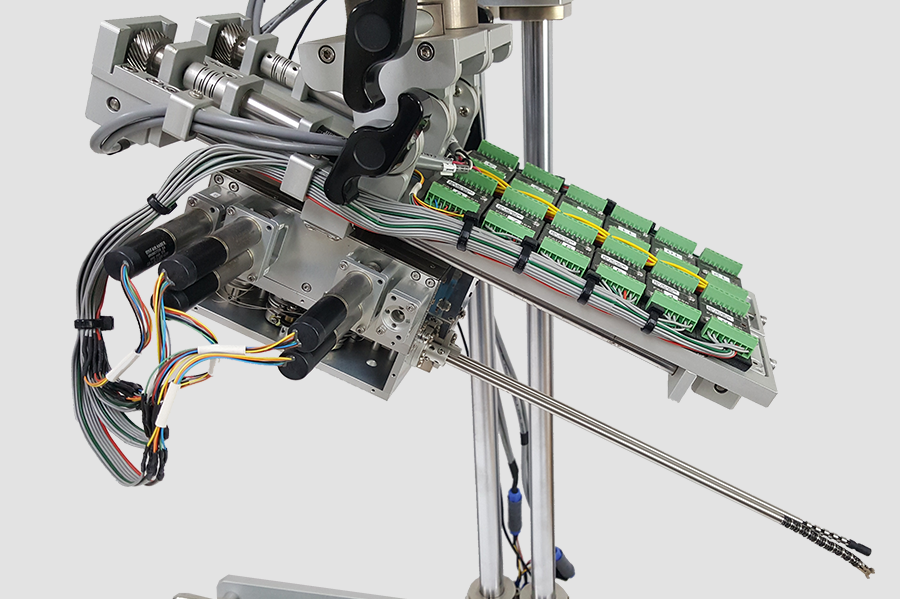
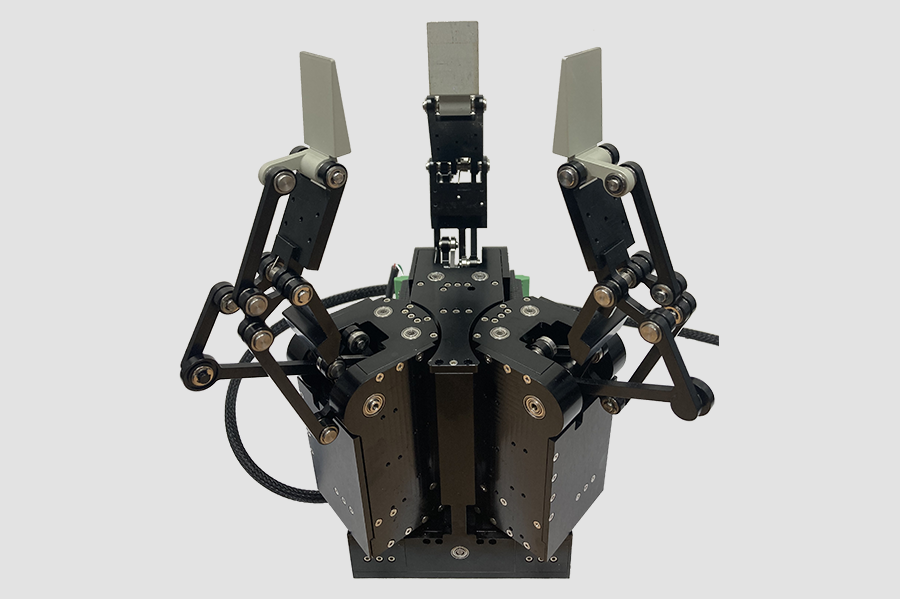
The second representative technology is the design technology of various robot mechanisms including parallel robots. Representative products include omni-directional mobile robots, intelligent gripper and hand design technology, and various types of parallel haptic devices. Based on the technology development experience of the past 30 years, we intend to apply it to the field of service robots in various fields.
페라자는 로봇기술의 인류사회 공헌을 목적으로 합니다. 페라자는 한양대학교 휴먼로보틱스 연구실의 지난 20여 년간 축적된 기술을 근간으로 2020년에 창업되었습니다.
페라자의 대표기술은 수술로봇분야입니다. 2008년에 국내 최초로 척추수술로봇개발을 처음으로 개발하였고, 2010년대에는 이비인후과 수술로봇 그리고 혈관중재수술로봇 등 다양한 수술로봇을 개발해 왔습니다. 첫 번째 사업화 아이템은 간암 환자의 색전술을 위한 인공지능 내비게이션 기반 혈관중재수술로봇 시스템입니다. 지난 3년간 (2018-2020)의 1단계 국가과제를 통해서 1차 그리고 2차 시제품이 개발되었으며 향후 2년간 인허가 및 사업화를 위한 시제품이 개발될 예정입니다. 향후에는 색전술 분야 뿐 아니라 전반적인 혈관중재시술 분야를 모두 아우르는 모듈형 혈관중재수술 로봇시스템 개발에 박차를 가하고 있으며, 인체의 다양한 개구부에 삽입하여 진단 및 치료 목적으로 쓰이는 굴곡형 메커니즘을 활용한 다양한 수술로봇 개발에도 연구개발을 진행하고 있습니다.
두 번째 대표기술은 병렬형 로봇을 비롯한 다양한 로봇 메커니즘 설계 기술입니다. 대표 제품군으로는 전방향 모바일로봇, 지능형 그리퍼 및 핸드 설계기술, 그리고 다양한 형태의 병렬형 햅틱장치 등입니다. 지난 30여 년간의 기술개발 경험을 바탕으로 여러 분야의 서비스로봇 분야에 적용하고자 합니다.
We developed a surgical robot for spinal fusion in 2008. Cadaver test was successfully conducted and its result was published in Neurosurgery(2010).
We developed three kinds of surgical robots for ENT procedures from 2011 to 2016. Several cadaver tests were conducted and their results were published in numerous journals.
We developed a vascular intervention surgical robot for chemotherapy of liver cancer. We are ready for the first human trial.
문의사항이나 제품에 대한 궁금증이 있으시다면 바로가기를 클릭해 주세요.